Linux I/O Model
Linux IO Model
Buffered IO (default)`
alias: normal IO
Read
A read process could be divided into 2 stages:
- Waiting for the data (from disk or network) to be ready in kernel
page cache( load disk data through DMA ) - Copying the data from the kernel to the process
Write
Write back Model.
Direct IO
Read
Only 1 stage: loading data into process space by DMA
Write
direct write to disk.
Comparsion
- Buffered beats Direct
- decoupling disk and process
- reduce IO reads
- Direct beats Buffered
- self-caching applications (e.g. database) work with their own cache management.
- Avoid memory copy between kernel space and user space
IO Model
We talk about the IO model about buffered Reading in the following.
IO Model Matrix
| Blocking(阻塞) | Non-blocking(非阻塞) | |
|---|---|---|
| Synchronous(同步) | 1.Blocking IO(default socket, file read/write) | 2. non-blocking IO |
| Asynchronous(异步) | 3. IO multiplexing (select, epoll, poll) | 4.AIO |
Block vs Sync
They are discussed on two indepedent dimensions.
Sync / Async
Determined by communication (function call is request, return value is response).
- Sync: Each function call returns a response.
- Aysnc: Each function call returns with nothing. The response will be sent back later.
blocking / non-blocking
Determined by whether the process need to wait
- blocked: process need to wait until function completed
- unblocked: process could do other things
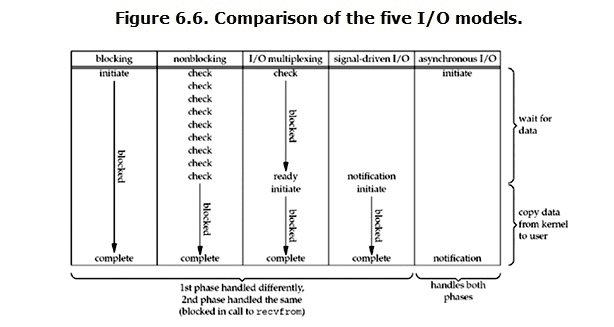
Typical IO Model
Blocking IO (Blocking + Sync)
The application blocks until the system call is complete (data transferred or error).
The two stages are blocked.
e.g.
- socket
- stream IO
- normal read/write
pros & cons
- pros:
- no delay
- easy for developing
- cons:
- inefficient
Non-blocking IO (non-Blocking + Sync)
This model requires numerous calls (polling 轮循) to await completion.
e.g.
- java NIO
- read/write with
O_NONBLOCKflag
pros & cons
- pros
- do other things when waiting for data ready
- cons
- larger latency because it can’t not read data immediatly when data is ready in kernel.
IO multiplexing (Block + Async)
similiar to nonblocking IO, the only difference is that “other things” is listening other IO channels.
e.g.
select, poll, epoll
pros & cons
- pros
- single thread listens multiple IO channels, no context switch overhead
- cons
- additional system call
selectfor each read
- additional system call
Asynchronous non-blocking I/O (non-Blocking + Async)
The read request returns immediately, indicating that the read was successfully initiated. The application can then perform other processing while the background read operation completes. When the read response arrives, a signal or a thread-based callback can be generated to complete the I/O transaction.
e.g.
AIO(linux)
Signal-Driven IO (half-Blocking + Async)
uncommon model.
Only stage 2 is blocked.
Strictly speaking, it’s could be regarded as block IO.
Summary